Требования, предъявляемые к исполнительным двигателям
Помимо общих требований (предъявляемых ко всем машинам: малые габариты и вес, дешевизна, высокий КПД, надежность и т.д.), к исполнительным двигателям предъявляются и специфические требования: управляемость двигателя при всех режимах работы (отсутствие самохода), линейность механических и регулировочных характеристик, высокое быстродействие, бесшумность работы, малая мощность управления, отсутствие радиопомех и т.д. Эти требования заставляют в ряде случаев отказываться от традиционных конструкций машин общего применения, что ведет к увеличению габаритов, снижению КПД и т.п.
Самоход исполнительных двигателей. Наибольшая асимметрия магнитного поля в исполнительном двигателе будет иметь место при отсутствии напряжения на обмотке управления. При этом режиме коэффициент сигнала

При




В однофазном двигателе общего применения результирующий момент при пуске равен 0, но в довольно широком диапазоне скоростей (при

|
|
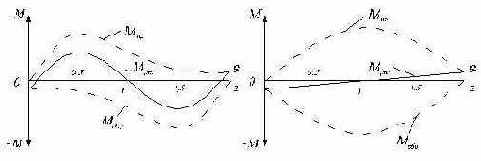
Рис.2.24.Зависимости



Такой двигатель может работать с некоторой установившейся скоростью, если каким-либо образом его предварительно привести во вращение. Однако, использовать такой двигатель в качестве исполнительного невозможно, так как при


Зависимости


Поэтому полученное условие отсутствия самохода можно записать:

Это условие выполняется, если


При изготовлении исполнительных двигателей требуется повышенное внимание к качеству технологических операций, т. к. наличие межвиткового замыкания обмотки статора, а также замыкание между собой пакетов статора может привести к эллиптичности поля машины.
2.4.6. Исполнительный двигатель с амплитудным управлением
Напряжение управления






При амплитудном управлении


Величину

Токи прямой и обратной последовательностей:

.
Аналогично определяются симметричные составляющие тока в фазе управления:


Сопротивления


Рис.2.25. Схема замещения синхронного двигателя для прямой (а) и обратной (б) последовательностей.
Они отличаются величиной активного сопротивления ротора. Сопротивление ротора зависит от скольжения относительно прямого и обратного магнитных полей. Сопротивление ротора для токов прямой последовательности:

Для токов обратной последовательности:

где

- относительная скорость вращения ротора.
