Сравнение исполнительных двигателей при различных методах управления
Проведенный анализ позволяет сделать следующие выводы:
а) линейность механических и регулировочных характеристик выше всего при фазовом управлении. Амплитудно-фазовое управление дает наибольшее отклонение от прямой линии.
б) Мощность управления при амплитудном и амплитудно-фазовом управлении практически одинакова и пропорциональна квадрату коэффициента сигнала.
в) степень использования (электромагнитная мощность при круговом поле и неподвижном роторе) для всех трех способов управления одинакова, если одинаково напряжение возбуждения.
г) наиболее простым является амплитудно-фазовое управление (конденсаторная схема), при котором не требуется никаких дополнительных устройств для сдвига фаз между напряжениями управления и возбуждения. Это обстоятельство и объясняет широкое применение его в автоматике.
3. Синхронные электрические машины.
3.1. Общие сведения
Электромагнитная схема синхронной машины имеет вид (рис3.1):
Рис. 3.1. Электромагнитная схема синхронной машины (а) и схема ее включения (б).
Важным отличием синхронной машины от асинхронной является то, что главный магнитный поток в ней создается НС постоянного тока возбуждения Iв , который машина получает от источника Uв, т. е. в машине имеет место раздельное питание обмоток статора и ротора.
Статор машины выполнен аналогично статору асинхронной машины. На нем расположена

При вращении ротора со скоростью n2 в обмотке статора индуктируется ЭДС

f1=(pn2)/60, (3.1.1)
где
p – число пар полюсов машины.
При подключении обмотки статора к какой-либо нагрузке в ней протекает многофазный ток, который создает вращающееся магнитное поле. Скорость вращения этого поля:
n1=(60f1)/p. (3.1.2)
Из приведенных выше выражений следует n1=n2, т. е. магнитные поля ротора и статора вращаются с одинаковой скоростью. Поэтому рассматриваемая машина получила название синхронной. В синхронной машине результирующий магнитный поток Фрез создается совместным действием намагничивающих сил обмотки возбуждения и обмотки статора и вращается с той же скоростью, что и ротор.
Часть электрической машины, в которой индуктируется ЭДС, принято называть якорем, поэтому в синхронной машине статор является якорем, а ротор – индуктором. Синхронная машина может работать в качестве автономного генератора, питающего подключенную к ней нагрузку, а так же подключаться параллельно к сети, к которой присоединены другие генераторы. При работе параллельно с сетью она может отдавать или потреблять электрическую энергию, т.е. работать генератором или двигателем. В результате взаимодействия тока ротора Iв с вращающимся магнитным полем, создается электромагнитный момент, который при работе машины в двигательном режиме является вращающим, а в генераторном – тормозящим.
Таким образом, синхронная машина имеет следующие особенности:
- ротор машины, как в двигательном, так и в генераторном режимах, вращается с постоянной скоростью, равной скорости вращения магнитного поля;
- частота изменения ЭДС Е1, индуктируемой в обмотке статора, пропорциональна скорости вращения ротора;
- в обмотке ротора ЭДС не индуктируется, а магнитное поле создается постоянным током, подводимым от внешнего источника, или постоянными магнитами.
Постоянство скорости вращения ротора синхронной машины обусловливает область ее применения: в качестве генераторов промышленной частоты на подстанциях или в дизель – генераторах, а в качестве двигателей в тех случаях, когда необходимо постоянство скорости вращения выходного вала машины.
В случае параллельной работы с другими синхронными машинами для включения синхронной машины в общую сеть требуется предварительная синхронизация, т. е. частота выходного напряжения должна быть строго равна частоте сети, а ЭДС машины – равной по величине и противоположной по фазе напряжению сети. При идеальной синхронизации машины с сетью токи в обмотках статора после подключения машины к сети, будут равны нулю. В таких условиях синхронная машина не отдает энергию в сеть и не потребляет ее, т. е. по отношению к сети она не является ни генератором, ни двигателем. Собственные потери синхронной машины, механические и магнитные, при этом покрывает первичный двигатель.
Если увеличивать момент, приложенный первичным двигателем к валу машины, то под действием возросшего момента ротор машины сместится вперед, и если раньше середина полюса ротора находилась против проводников данной фазы статора как раз в тот момент, когда напряжение сети на этой фазе достигло своего максимума, то теперь это условие нарушается, и так как ЭДС ротора и напряжение сети уже взаимно не уравновешиваются, то в обмотках статора возникает ток, создаваемый результирующим напряжением. Взаимодействие этого тока с полем машины создает тормозящую силу, воздействующую на ротор. При посредстве этой силы механическая мощность первичного двигателя будет превращаться в электрическую мощность, отдаваемую генератором в сеть. Поле ротора будет как бы вести за собой поле статора.
Если затем уменьшать вращающий момент на валу синхронной машины, то под действием тормозящего момента электромагнитных сил поле ротора будет уменьшать свой угол опережения по отношению к полю статора, и вместе с уменьшением угла между осями полей будет уменьшаться и тормозящая сила взаимодействия токов статора и поля машины.
Наконец, когда напряжение сети будет уравновешиваться ЭДС статора, тогда машина перестанет отдавать энергию в сеть, ток в обмотке статора, а, следовательно, и тормозящая электромагнитная сила, становится равной нулю.
Если теперь приложить к валу машины вместо вращающего тормозящий момент механической нагрузки, то ротор сместится по отношению к вращающему полю в сторону отставания. Вновь возникнут токи в обмотках статора и создадут электромагнитные силы взаимодействия токов статора и поля ротора, но на этот раз силы будут стремиться сместить ротор вперед, т. е. создадут вращающий момент, при посредстве которого электрическая мощность сети превращается в механическую мощность на валу машины; таким путем синхронная машина переходит к работе двигателем. Режим машины меняется от генераторного к двигательному и обратно в зависимости от механического воздействия на вал машины, причем электромагнитные силы играют роль своеобразной упругой связи между полем ротора и полем статора. Можно сравнить их с пружинами, связывающими два шкива А и В – ведущий и ведомый (рис. 3.2).


а) б) в)
Рис. 3.2. Механическая модель образования синхронного момента в виде двух шкивов, соединенными пружинами ((а) – нет передачи энергии; (б) – передача энергии от шкива А к шкиву В; (в) – передача энергии от шкива В к шкиву А).
Шкив изображает в такой модели поле ротора, шкив В – поле статора. Всякое изменение механической силы на валу шкива А вызывает изменение относительного положения шкивов и изменение направления и степени натяжения пружин. При

Таким образом, при параллельной работе синхронной машины с сетью скорость вращения машины жестко определяется частотой сети; изменение момента на валу меняет лишь угол между осями полей ротора и статора, в то время как в асинхронной машине в таких условиях меняется скорость вращения ротора (скольжение).
Реакция якоря в синхронном генераторе. Магнитное поле нагруженной синхронной машины возбуждается не только НС ротора, на это поле действует НС обмотки якоря, обтекаемой нагрузочным током.
В асинхронной машине ток статора изменяется автоматически вслед за изменение тока ротора и, таким образом, сохраняется практически постоянным поток в воздушном зазоре. В синхронной машине изменение тока статора не вызывают автоматического изменения постоянного тока возбуждения. Поэтому результирующее магнитное поле синхронной машины изменяется с изменением нагрузки, меняется относительное положение вращающегося поля статора к вращающемуся полю ротора, а, следовательно, и характер реакции якоря. Если рассматривать синхронный генератор, то при активной нагрузке ток в фазе статора достигает максимума в тот момент, когда против этой фазы находится середина полюса (3.3а).
a) б) в)
Рис. 3.3. Реакция якоря и кривые распределения индукций в неявнополюсной машине при различных условиях нагрузки.
Поле статора будет в этом случае поперечным, ось потока полюсов ротора перпендикулярна оси поля статора – у набегающего конца полюса оно направлено против поля ротора и ослабляет это поле, а у сбегающего конца поля оно усиливает поле ротора. Реакция якоря в случае активной нагрузки генератора вызывает смещение оси результирующего поля в сторону вращения. Результирующий поток при этом несколько изменяется вследствие влияния насыщения, а именно, он ослабляется у набегающего конца полюса больше, чем усиливается у сбегающего.
В идеальном случае чисто индуктивной нагрузке генератора (3.3б) величина тока в фазе статора будет достигать своего максимального значения только тогда, когда соответствующий полюс ротора уйдет вперед на 90 градусов; при индуктивной нагрузке поток статора направлен вдоль полюса ротора против потока ротора.
Следовательно, при индуктивной нагрузке НС тока статора стремится возбудить размагничивающий продольный поток.
В идеальном случае чисто емкостной нагрузке генератора (3.3в) ток статора будет достигать максимума тогда, когда соответствующий полюс ротора будет находиться еще на расстоянии 90 градусов от середины фазы. В этом случае поток ротора будет намагничивающим продольным.
Условие синусоидальности распределения поля статора вдоль окружности статора существенно нарушается в случае явнополюсных роторов, у которых распределение поля статора вдоль окружности статора далеко не синусоидально.
Следовательно, в синхронной машине реакция якоря вызывает изменение магнитного поля машины и в результате – изменение ее ЭДС. В машинах с явными полюсами это явление еще осложняется искажением кривой ЭДС. Для синхронных генераторов подобное влияние величины тока и сдвига фаз нагрузки на напряжение машины весьма нежелательно. Чтобы свести влияние реакции якоря к минимуму, необходимо, чтобы НС якоря была мала по сравнению с НС ротора. Для осуществления этого условия необходимо увеличить магнитное сопротивление машины.
Лучше и проще всего повышение магнитного сопротивления осуществляется путем увеличения воздушного зазора машины. Однако при этом необходимо соответствующее увеличение НС ротора, но в синхронной машине это увеличение намагничивающего тока допустимо, т. к. энергия магнитного поля ротора остается неизменной, а возбудитель синхронной машины должен давать энергию только для покрытия тепловых потерь в цепи ротора. В асинхронной машине условия иные, там намагничивающий ток должен поддерживать колебания энергии магнитного поля машины – он является реактивным током, ухудшающим cos? установки, и желательно сделать его возможно меньшим.
Явление реакции якоря относится и к синхронным двигателям, но, т. к. в этих двигателях форма кривой ЭДС практически малосущественна, то реакция якоря в них имеет второстепенное значение.
3.1.1. Векторные диаграммы синхронного генератора
Результирующий магнитный поток в синхронном генераторе можно разложить на поток ротора, поток рассеяния статора и поток реакции якоря. Поток рассеяния статора является частью потока статора, замыкающегося помимо ротора поперек пазов статора. Этот поток проходит значительную часть своего пути в воздухе, поэтому его можно считать пропорциональным току статора и совпадающим с этим током по фазе.
Если не учитывать влияние насыщения стали, то поток реакции якоря, так же как и поток рассеяния пропорционален току якоря (статора)

При принятых допущениях ЭДС







Следовательно,

Рис. 3.4. Векторная диаграмма синхронной машины в режиме генератора.
Поток ротора




где
xH и RH – индуктивное и активное сопротивление цепи нагрузки генератора.
Чтобы определить положение вектора



3.1.2. Электромагнитный момент синхронной машины
Для получения выражения электромагнитного момента синхронной машины рассмотрим ее векторную диаграмму в несколько упрощенном виде (рис 3.5):
Рис. 3.5. К определению электромагнитного момента синхронной машины.
Построение упрощенной векторной диаграммы начнем с вектора напряжения сети



Положение вектора потока ротора



т. е. напряжение равно сумме ЭДС, индуктируемых в обмотке якоря тремя потоками машины. Но физически эти потоки образуют один результирующий магнитный поток


Угол между векторами

Мощность синхронной трехфазной машины:

Из прямоугольного треугольника, гипотенузой которого является вектор

На основании той же векторной диаграммы

Это дает возможность представить электрическую мощность синхронной машины в
виде:

Электромагнитный момент синхронной машины:

Эта зависимость носит название угловой характеристики синхронной машины (рис. 3.6).
Рис. 3.6. Угловая характеристика синхронной машины.
Если ?>0, то мощность и момент положительны, машина работает в режиме генератора и отдает электрическую мощность, а электромагнитный момент при этом является тормозящим моментом, который преодолевает первичный двигатель. Работа, совершаемая первичным двигателем, преобразуется в электрическую работу, отдаваемую генератором в сеть. При увеличении создаваемого первичным двигателем вращающего момента, ротор машины, вследствие сообщаемого ему ускорения, увеличивает угол ? и после нескольких колебаний около синхронной скорости восстанавливается равновесие вращающегося момента первичного двигателя и тормозящего электромагнитного момента генератора. Таким же образом восстанавливается это равновесие при уменьшении вращающего момента первичного двигателя посредством уменьшения угла ? и вызываемого этим снижения тормозящего электромагнитного момента.
Работа синхронного генератора устойчива при изменении угла ? в пределах от 0 до 90 градусов.
Кривая Мэ.м.=F(?) за точкой ?=90 соответствует области неустойчивой работы синхронного генератора. В этих условиях вращающий момент первичного двигателя превышает максимальный тормозящий момент генератора, т. к. увеличение ? свыше 90 приводит к уменьшению тормозящего электромагнитного момента Мэ.м. Избыток вращающего момента создает дальнейшее ускорение ротора, что обуславливает дальнейшее возрастание ? и новое уменьшение тормозящего момента и т.
д. пока генератор не выпадет из синхронизма. В таком случае нарушается автоматическая связь между частотой сети и скоростью вращения ротора; ЭДС машины и напряжение сети перестают уравновешивать друг друга, и токи в обмотках статора могут достигнуть весьма больших значений токов короткого замыкания, т. к. мгновенные значения ЭДС статора и напряжение сети могут теперь складываться, а не вычитаться, как при нормальной работе. При выпадении генератора из синхронизма его отключают от сети приборы автоматической защиты.
Уменьшение вращающего момента первичного двигателя вызывает соответствующее уменьшение угла ?, и когда ? станет равным нулю, тогда первичный двигатель будет лишь покрывать потери синхронной машины; в этих условиях при ?=0 машина не будет отдавать энергию в сеть как генератор и потреблять ее из сети как двигатель. Этот режим является промежуточным между режимами генератора и двигателя.
Если приложить к валу синхронной машины тормозящий момент, то он вызовет некоторое замедление вращения ротора, вследствие чего угол ? станет отрицательным. Это значит, что ротор отстанет на угол ?/р от результирующего поля машины, и последнее станет ведущим, а ротор – ведомым. Перемена знака ? вызовет изменение знака электрической мощности Р и электромагнитного момента Мэ.м.; машина переходит в режим двигателя; она потребляет энергию из сети, ее электромагнитный момент стал вращающим моментом, уравновешивающим механический тормозящий момент, приложенный к валу машины.
В этом случае для построения упрощенной векторной диаграммы синхронного двигателя удобно использовать векторы
Рис. 3.7. Упрощенная векторная диаграмма синхронного двигателя.
Будем считать, что возбуждение машины при переходе от генераторного режима к двигательному осталось неизменным, и поэтому сохраним в диаграмме двигателя, как и в диаграмме генератора, ту же длину вектора

Теперь
Режим двигателя устойчив при изменении ? в пределах от 0 до -90 и неустойчив при ?<-90 градусов, когда возрастание ? не увеличивает, а уменьшает вращающий момент. Если механический тормозящий момент, приложенный к валу двигателя, превзойдет максимальное значение вращающего электромагнитного момента Мэ.м.max, то произойдет выпадение двигателя из синхронизма – ротор постепенно уменьшит скорость и, наконец, остановится, ЭДС в обмотке уменьшится до 0, а токи достигнут весьма больших значений, во много раз превышающих номинальные. Автоматическая защита отключит двигатель от питания сети.
Работающая параллельно с сетью синхронная машина нагружается как в режиме двигателя, так и в режиме генератора, путем изменения момента, приложенного к валу. Практически используется только кратковременный переход двигателя в режим генератора для быстрого торможения двигателя.
Величина

называется синхронизирующей мощностью, а величина

- синхронизирующим моментом.
Практически синхронная машина работает сравнительно далеко от предела статической устойчивости, соответствующего ?=90 градусов. У синхронных генераторов угол ? при номинальной нагрузке не превышает 20 градусов, а у двигателей, как менее ответственной машины, этот угол достигает 30 градусов.
Форма угловой характеристики синхронной машины объясняется картиной взаимодействия потоков Фв и Ф в синхронной машине (рис. 3.8).
Рис. 3.8. Картина взаимодействия потоков





При ?=0 (рис.3.8а) между ротором и статором существует только сила притяжения (между двумя магнитами). Тангенциальная составляющая силы равна 0, Поэтому электромагнитный момент равен 0 .
При ?>0 (рис.3.8б) ось потока возбуждения опережает ось результирующего потока на угол ?, вследствие чего тангенциальная составляющая силы создает тормозной момент для внешнего двигателя, приводящего во вращение ротор синхронного генератора. Максимум тормозного момента соответствует ?=90 градусов, когда ось полюсов ротора расположена между осями полюсов статора. При ?<0 (рис.3.8в) (режим двигателя) ось потока возбуждения отстает от оси результирующего потока. Поэтому, возникающие при этом тангенциальные силы создают вращающий момент, который приводит во вращение ротор синхронной машины.
Подключение синхронной машины к сети. При подключении синхронного генератора применяют два способа: точная синхронизация и самосинхронизация.
Первый способ требует предварительную синхронизацию включаемого генератора, которая осуществляется следующим образом (рис. 3.9).
Рис. 3.9. Схема подключения синхронного генератора к сети с помощью лампового синхроноскопа.
Скорость машины Г доводится примерно до синхронного числа оборотов и ее возбуждение регулируется так, чтобы вольтметр на ее зажимах показал значение, равное напряжению сети. При этом последовательность фаз машины должна соответствовать последовательности фаз сети. Перед подключением машины к сети необходимо более точное регулирование частоты вращения машины и фазы ее ЭДС. Для этой цели используют синхроскопы. В простейшем случае синхроскоп составляется из ламп накаливания. Чем меньше частота генератора отличается от частоты сети, тем медленнее будут происходить колебания света фазных ламп. Достигают совпадения частот, при котором промежутки времени между следующими друг за другом вспышками ламп будут не менее 3…5 сек. Затем в момент полного затухания ламп замыкается рубильник.
Сущность метода самосинхронизации состоит в том, что генератор включается на сеть без возбуждения, когда его скорость отличается от синхронной на 2…3%. Обмотка ротора во время такого включения должна быть замкнута накоротко или на некоторое сопротивление.
Сейчас же после включения генератора на сеть в ротор подается постоянный ток возбуждения, и генератор сам доходит до синхронной скорости под действием электромагнитных сил.
Вращающий момент синхронного двигателя при пуске равен 0, поэтому пуск двигателя состоит из двух этапов: первый этап – синхронный пуск с помощью короткозамкнутой обмотки, расположенной на роторе, и второй этап – втягивание в синхронизм после включения постоянного тока возбуждения. Во время первого этапа асинхронного пуска обмотка возбуждения отключается от источника постоянного тока и замыкается на активное сопротивление, превышающее активное сопротивление обмотки возбуждения в 10…15 раз. Не следует оставлять обмотку возбуждения разомкнутой, т. к. вращающееся поле может индуктировать в ней весьма значительную ЭДС, опасную для изоляции. Но с другой стороны, нецелесообразно было бы замыкать эту обмотку накоротко, т. к. в ней возникает значительный однофазный ток, который будет тормозить ротор по достижении им половины синхронной скорости.
3.2. Реактивный двигатель
Реактивным двигателем называется синхронный двигатель без обмотки возбуждения и без постоянных магнитов. Вращающий момент в таких двигателях возникает вследствие различия магнитных проводимостей по продольной и поперечной осям машины (рис. 3.10).
Рис. 3.10. Схема, иллюстрирующая возникновение реактивного момента.
Статор синхронной реактивной машины выполняется, так же как и статор обычной машины переменного тока.
Рис.3.11. Конструкции ротора
Ротор собирается из стальных листов специального профиля (рис.3.11).
На его валу расположена короткозамкнутая обмотка для асинхронного пуска синхронного реактивного двигателя.
Электромагнитный момент синхронного реактивного двигателя выражается следующей зависимостью:

где
xd и xq – синхронные индуктивные сопротивления по продольной и поперечной осям машины.
Начальный пусковой момент у этих двигателей равен 0. Поэтому в них применяется асинхронный способ пуска, для чего используется короткозамкнутая обмотка на роторе.
Реактивные двигатели проще по конструкции, дешевле и надежнее в эксплуатации, чем обычные синхронные машины с обмоткой возбуждения на роторе.
Основные недостатки двигателей: низкий cos? и КПД, большие размеры, малая величина максимального момента. В двигателе мощностью несколько десятков ватт КПД составляет 0,3…0,4, а мощностью до 10 ватт – менее 0,2.
Так как момент двигателя пропорционален U2, то двигатель чувствителен к колебаниям питающего напряжения.
Угловая характеристика реактивного двигателя изображена на рис. 3.12.
Рис. 3.12. Угловая характеристика реактивного двигателя.
3.3. Гистерезисный двигатель
Гистерезисным двигателем называется синхронный двигатель, в котором вращающий момент создается за счет явления гистерезиса при перемагничивания ферромагнитного материала ротора. Статор гистерезисного двигателя подобен статору обычной машины переменного тока. Ротор представляет собой стальной цилиндр из ферромагнитного магнитотвердого материала (имеющего широкую петлю гистерезиса) без обмотки. С целью удешевления ротор делают сборным: кольцо из ферромагнитного материала и немагнитная или магнитомягкая втулка (рис.3.13.а).
а) б)
Рис. 3.13. Устройство гистерезисного двигателя (а) и схема, иллюстрирующая возникновение гистерезисного момента (б).
В гистерезисном двигателе ротор, вращающийся с синхронной скоростью, представляет собой постоянный магнит. Ось магнита из-за явления гистерезиса отстает от оси вращающегося магнитного поля на угол ?г гистерезисного сдвига, вследствие чего возникает тангенциальная составляющая fг сил взаимодействия между полюсами ротора и потоком статора (рис. 3.13б). Величина силы fг и создаваемый ею момент не зависят от скорости вращения, а определяются шириной петли гистерезиса ферромагнитного материала.
|
Рис.3.14. Зависимость моментов гистерезисного двигателя от скольжения.
Если нагрузочный момент больше Мг (рис.3.14), то двигатель перейдет в асинхронный режим работы, т.е. появится дополнительный асинхронный момент Ма. Асинхронный момент Ма есть результат взаимодействия вращающегося магнитного поля с вихревыми токами, которые индуктируются этим полем в сердечнике ротора. Т к. ротор имеет большое активное сопротивление, то характеристика Ма=f(s) практически линейна и асинхронный гистерезисный момент максимален при s=1.



где
П2Н – потери на перемагничивание ротора при неподвижном роторе;
Пвихр.Н – потери на вихревые токи при неподвижном роторе;
Гистерезисные двигатели могут работать как в асинхронном, так и в синхронном режиме. Однако, в асинхронном режиме КПД двигателя резко уменьшается:
П=Пг+Пвихр=sП2Н+s2Пвихр.Н .
Достоинства гистерезисного двигателя: простота, надежность, плавность входа в синхронизм, бесшумность, малый пусковой ток, сравнительно высокий КПД (до 60%).
Недостатки: дороговизна, склонность к качаниям при резких изменениях нагрузки.
Мощность до 2000 Вт, частота f=50, 400 и 500 Гц.
3.4. Синхронные шаговые двигатели
В системах управления электроприводами с применением уже рассмотренных нами типов двигателей для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя (рис. 3.15).
Рис.3.15. Система отработки угла (положения) выходного вала двигателя с использованием датчика обратной связи.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа. В отличие от синхронных машин
непрерывного вращения шаговые двигатели имеют на статоре явно выраженные
полюса, на которых расположены катушки обмоток управления.
Рис. 3.16. Принципиальная схема управления шаговым двигателем.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления (рис. 3.17).
 |
Рис.3.17. Симметричная система коммутации.
 |
|||
 |



Рис.3.18. Несимметричная система коммутации.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит (рис. 3.4.5), при числе пар полюсов больше 1, выполненный в виде «звездочки» (рис. 3.4.6).
Число тактов КТ системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления КТ =4, а для несимметричной КТ =8.
В общем случае число тактов КТ зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:

где
n1=1 при симметричной системе коммутации;
n1=2 при несимметричной системе коммутации;
n2=1 при однополярной коммутации;
n2=2 при двуполярной коммутации.
Рис. 3.19. Схемы, иллюстрирующие положения ротора шагового двигателя с постоянными магнитами при подключении к источнику питания одной (а) и двух обмоток (б).
При однополярной коммутации ток в обмотках управления протекает в одном направлении (рис. 3.19а); при двуполярной – в обеих (рис. 3.19б).
Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают.
Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1).
Реальные шаговые микродвигатели являются многополюсными (р>1).
Рис. 3.20. Двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:

Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р= 4…6.
Величина

Реактивные шаговые двигатели. У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора (рис.3.21).
а) б)
Рис. 3.21. Принцип действия реактивного редукторного шагового двигателя: (а) – исходное положение устойчивого равновесия; (б) – положение устойчивого равновесия. cдвинутое на один шаг (

Если зубцы ротора соосны с одной диаметрально расположенной парой полюсов статора, то они сдвинуты относительно каждой из оставшихся трех пар полюсов статора соответственно на ¼, ½ и ¾ зубцового деления.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:

В выражении для КТ величину n2 следует брать равной 1, т. к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то - 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают.
Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики.
Линейные шаговые синхронные двигатели. При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов (рис. 3.22).
Рис. 3.22. Схема, иллюстрирующая работу линейного шагового двигателя.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнитопровода ротора сдвинуты на половину зубцового деления ?/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления ?/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления ?/4.

где
KТ – число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Режимы работы синхронного шагового двигателя. Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления
серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
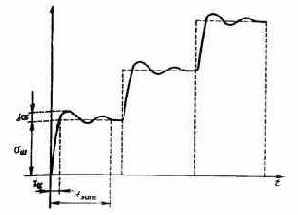

Рис.3.23. Процесс отработки шагов шаговым двигателем.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Рис. 3.24. Предельная механическая характеристика шагового двигателя.
С увеличением частоты управляющих импульсов величина максимального момента падает, что объясняется действием демпфирующего момента (вызванного перечисленными выше потерями), и ЭДС самоиндукции становится соизмеримой с напряжением источника питания.
Рис.3.25. Предельная динамическая характеристика шагового двигателя.
Приемлемость падает с увеличением нагрузки.
.
4. Машины постоянного тока
4.1. Устройство, принцип действия и электромагнитный
момент машины постоянного тока
Устройство машины постоянного тока подобно обращенной синхронной машине, у которой обмотка якоря расположена на роторе, а обмотка возбуждения – на статоре. Основное отличие заключается в том, что коллекторная машина постоянного тока имеет механический преобразователь частоты – коллектор, а при мощности более 1…1,5 кВт так же и дополнительные полюса (ДП).
На статоре расположены главные полюса (ГП) с катушками обмотки возбуждения (ОВ) и дополнительные полюса. Обмотка якоря состоит из отдельных якорных катушек, включающих в себя несколько секций, концы которых присоединяются к соответствующим коллекторным пластинам. Возможны два основных способа соединения отдельных секций в обмотку: петлевой (рис. 4.1а) и волновой (рис. 4.1б):
а) б)


Рис. 4.1. Простая петлевая (а) и волновая (б) обмотки машины постоянного тока.
Чтобы присоединить следующую секцию обмотки, можно вернуться под исходный полюс; таким путем при поступательном движении вдоль окружности якоря выполняются соединения петлевой обмотки, называемой так же параллельной обмоткой.
Щетки делят петлевую обмотку на столько пар параллельных ветвей (а), сколько машина имеет пар полюсов (p), т.е. при петлевой обмотке

При втором способе образования обмотки – соединяются между собой секции, лежащие под следующими по окружности якоря полюсами, выполняемого при поступательном движении вдоль окружности якоря. Таким образом, выполняется волновая обмотка, называемая так же последовательной обмоткой. Число параллельных ветвей при волновой обмотке равно 2 (2а=2), независимо от числа полюсов машины. Чтобы замкнуть волновую обмотку, т.е. чтобы включить в нее все секции обмотки, нужно несколько раз обойти окружность якоря. Петлевая обмотка замыкается после одного обхода якоря.
Простая волновая обмотка применяется для машин малой и средней мощности (до 500 кВт) при напряжении 110 В и выше.
Простая петлевая обмотка применяется для двухполюсных машин малой мощности (до 1 кВт) и машин свыше 500 кВт.
Характерной особенностью машины постоянного тока является (рис. 4.2):
- постоянство (в пространстве) магнитного потока возбуждения;
- наличие преобразователя переменного тока в постоянный, в коллекторных машинах – это механический преобразователь (коллектор).
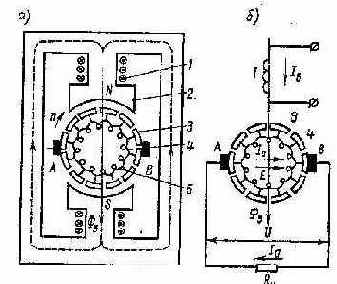
Рис. 4.2. Электромагнитная схема машины постоянного тока (а) и схема ее
включения (б).(1- обмотка возбуждения; 2- главный полюс; 3- коллектор; 4-щетки; 5- обмотка якоря).
При вращении обмотки якоря в неподвижном магнитном поле, в ней индуктируется переменная ЭДС, изменяющаяся с частотой:

где
n – скорость вращения якоря.
При вращении якоря между любыми двумя точками обмотки якоря действует переменная ЭДС. Однако между неподвижными контактными щетками действует постоянная по величине и направлению ЭДС E, равная сумме мгновенных значений ЭДС e1 , e2 , e3 и т.д. (рис.4.3), индуктированных во всех последовательно соединенных витках якоря, расположенных между этими щетками.
Е
Рис.4.3. Векторная диаграмма, индуктируемых в якорной обмотке ЭДС.
Зависимость ЭДС Е от магнитного потока машины и скорости вращения якоря имеет вид:


При подключении обмотки якоря к сети с напряжением U, ЭДС Е будет приблизительно равна напряжению U, и скорость вращения ротора:

Следовательно, благодаря наличию коллектора при работе машины постоянного тока в двигательном режиме скорость вращения ротора не связана жестко с частотой сети, как в асинхронных и синхронных машинах, а может изменяться в широких пределах путем изменения напряжения U и магнитного потока Ф.
Ось симметрии, разделяющая полюса машины постоянного тока, называется ее геометрической нейтралью.
При разомкнутой внешней цепи ток в обмотке якоря не будет протекать, т. к. ЭДС, индуктированные в двух частях обмотки якоря, расположенных по обе стороны геометрической нейтрали, направлены встречно и взаимно компенсируются. Для того чтобы подать от обмотки якоря во внешнюю цепь максимальное напряжение, эту цепь нужно присоединить к двум точкам обмотки якоря, между которыми действует наибольшая разность потенциалов.
Такими точками являются а и б, расположенные на геометрической нейтрали, где и следует устанавливать щетки А и В (рис.4.3). При вращении якоря точки а и б смещаются с геометрической нейтрали, но к щеткам будут подходить все новые и новые точки обмотки, между которыми действует ЭДС Е, поэтому ЭДС во внешней цепи будет неизменна по величине и направлению. Для уменьшения пульсаций ЭДС при переходе щеток с одной коллекторной пластины на другую в каждую параллельную ветвь обмотки якоря обычно включается не менее 16 активных проводников.
На якорь, по обмотке которого протекает ток I, действует электромагнитный момент:

При работе машины в двигательном режиме электромагнитный момент является вращающим, а в генераторном режиме – тормозным.
Реакция якоря машины постоянного тока
При холостом ходе магнитный поток в машине создается только НС


При работе машины под нагрузкой по обмотке якоря проходит ток, и НС якоря создает свое магнитное поле. Воздействие поля якоря на магнитное поле машины называют реакцией якоря. Магнитный поток Фaq , созданный НС якоря Faq в двухполюсной машине при установке щеток на нейтрали направлен по поперечной оси машины, поэтому магнитное поле якоря называют поперечным. В результате действия потока Фaq симметричное распределение магнитного поля машины искажается, и результирующий поток Фрез оказывается сосредоточенным в основном у краев главных полюсов. При этом физическая нейтраль б-б (линия, соединяющая точки окружности якоря, в которых индукция равна нулю) смещается относительно геометрической нейтрали а-а на некоторый угол ? (рис.4.4). В генераторах физическая нейтраль смещается по направлению вращения якоря; в двигателях – против направления вращения.
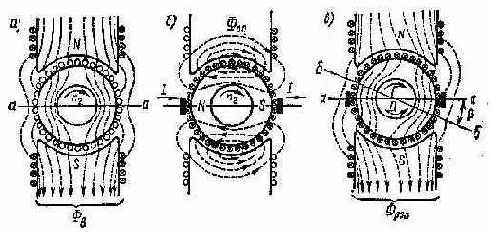
Рис. 4.4. Магнитное поле машины постоянного тока: от обмотки возбуждения (а), от обмотки якоря (б) и результирующее (в).
Вследствие сосредоточенного характера обмотки возбуждения, кривая распределения создаваемой ею НС


Рис.4.5. Распределение индукции в воздушном зазоре машины постоянного тока: от обмотки возбуждения (а), от обмотки якоря (б) и результирующее (в).
На основании закона полного тока НС якоря, действующая в воздушном зазоре на расстоянии x от оси главных полюсов определится выражением:

Следовательно, НС якоря Faq изменяется линейно вдоль его окружности; под серединой главного полюса она равна нулю, а в точках, где установлены щетки, имеет максимальное значение. Магнитная индукция в воздушном зазоре при ненасыщенной магнитной системе:

где

Из последнего выражения следует, что под полюсом при

Реакция якоря оказывает неблагоприятное влияние на работу машины постоянного тока:
а)- физическая нейтраль смещается относительно геометрической нейтрали на некоторый угол, что ухудшает коммутацию коллекторной машины;
б)- результирующий магнитный поток машины при насыщенной магнитной цепи уменьшается, а значит, уменьшается ЭДС Е, индуктированная в обмотке якоря при нагрузке, по сравнению с ЭДС Е0 при холостом ходе;
в)- в кривой распределения индукции

4.3. Коммутация в коллекторных машинах постоянного тока
Необходимым условием долговечности коллекторной машины постоянного тока является отсутствие искрения под щетками, так как искры быстро разрушают пластины коллектора и щетки.
Причины искрения могут быть механическими и электрическими. Основная механическая причина искрения – это ухудшение контакта между коллектором и щетками.
Электрической причиной является неудовлетворительная коммутация. Коммутацией в электрических машинах называется совокупность явлений происходящих при изменении направления тока в секциях обмотки якоря во время замыкания щетками этой секции накоротко.
Время, в течение которого секция обмотки вращающегося якоря замкнута щеткой накоротко, называется периодом коммутации:

где
вщ – ширина щетки;
Vk – окружная скорость коллектора.
Если бы в коммутируемой секции не индуктировалось ЭДС, то ход процесса коммутации тока в секции определялся бы только соотношением сопротивлений контактов щетки с двумя пластинами коллектора (рис.4.6).
Рис. 4.6. К расчету коммутационного процесса в коммутируемой секции якоря.
Будем считать, что ширина щетки не больше ширины одной коллекторной пластины и пренебрегать относительно небольшими сопротивлениями проводников, соединяющих обмотку якоря с коллектором, и самой секции, по сравнению с переходным сопротивлением rщ контакта щетки и коллектора.
Переходное сопротивление r1 контакта с пластиной, уходящей из-под щетки, должно возрастать во время коммутации, достигая бесконечности в конце периода коммутации:
r1=rщ


где
T- период коммутации;
t – время, прошедшее с момента начала коммутации.
В то же время переходное сопротивление контакта со второй пластиной уменьшается:

Ток I, поступающий в щетку из обмотки якоря, должен распределиться между двумя пластинами коллектора обратно пропорционально их переходным сопротивлениям:

С другой стороны, согласно первому закону Кирхгофа:

Решив эту систему уравнений, найдем ток в коммутируемой секции:

В начальный момент времени при t=0 этот ток


Ток I является током лишь одной параллельной ветви обмотки якоря; в общем случае при 2а параллельных ветвей, ток якоря

Следовательно, в общем случае

Такая коммутация называется прямолинейной или равномерной (рис. 4.7а). В этом идеальном случае плотность тока под всей щеткой неизменна во все время коммутации, благодаря чему отсутствуют коммутационные причины искрения.

Рис. 4.7. Законы изменения тока коммутируемой секции якоря при линейной (а) и нелинейной (б) коммутации.
Мы рассмотрели идеальный случай. В реальных условиях неизбежно возникают ЭДС самоиндукции в коммутирующей секции lL и ЭДС взаимоиндукции


Её можно выразить следующим образом:

Реактивная ЭДС задерживает изменение тока (рис. 4.7б) и делает коммутацию замедленной в течение большей части периода, но к концу периода, когда уходящая пластина выйдет из-под щетки, ток в секции принудительно примет значение

Для того, чтобы скомпенсировать действие реактивной ЭДС, необходимо противопоставить ей вторую ЭДС, называемую коммутирующей ЭДС


Коммутирующая ЭДС создается посредством движения витков коммутируемой секции во внешнем магнитном поле. В большинстве случаев ek индуктируется магнитным полем дополнительных полюсов машины Фд.п. . Следовательно,

При изменениях нагрузки изменяется реактивная ЭДС, пропорциональная току якоря, но одновременно в такой же мере меняется и коммутирующая ЭДС, т. к. обмотка дополнительных полюсов соединена последовательно с якорем.
Усилив поле дополнительных полюсов путем увеличения числа витков их обмотки, можно сделать

В машинах малой мощности для создания коммутирующего магнитного поля вместо дополнительных полюсов применяется сдвиг щеток с геометрической нейтрали. При таком сдвиге в коммутируемой секции ЭДС
Особо опасный случай неблагоприятной коммутации представляет собой круговой огонь по коллектору. Это – мощная электрическая дуга, замыкающаяся непосредственно по коллектору или даже перекидывающаяся на станину машины, при этом повреждение машины может быть весьма значительным. Круговой огонь возникает при резком броске тока якоря, что вызывает увеличение реактивной ЭДС, а она создает мощную дугу между щеткой и краем уходящей пластины. Эта дуга удерживается и растягивается вследствие вращения коллектора; в результате возникает короткое замыкание непосредственно на коллекторе машины, разрушающее коллектор и щетки.
4.4. Генераторы постоянного тока
В зависимости от способа питания обмотки возбуждения различают генераторы:
- с независимым возбуждением;
- с параллельным возбуждением;
- с последовательным возбуждением (сериесный);
- со смешанным возбуждением (компаундный); он имеет две обмотки возбуждения; одна включена параллельно обмотке якоря, а другая - последовательно с нею и нагрузкой.
Генераторы малой мощности иногда выполняются с постоянными магнитами. Свойства таких генераторов близки к свойствам генераторов с независимым возбуждением.
В генераторе с независимым возбуждением (рис. 4.8а) ток возбуждения

Основными характеристиками генератора являются характеристики: холостого хода, внешняя, регулировочная и нагрузочная.
Рис. 4.8. Принципиальная схема генератора с независимым возбуждением (а) и его характеристика холостого хода (б).
Характеристика холостого хода U0=f(Iв) при Iн=0 и n=const (рис. 4.8б). Расхождение входящей и нисходящей ветвей характеристики объясняется наличием гистерезиса в магнитопроводе машины. Eост составляет 2…4 % от Uном.
а) б)
Рис. 4.9. Внешняя (а) и регулировочная (б) характеристики генератора с независимым возбуждением.
Внешней характеристикой называется зависимость U=f(Iн) при n=const и Iн=const (рис. 4.9а). Под нагрузкой напряжение генератора

где
?r – сумма сопротивлений всех обмоток, включенных последовательно в цепь якоря (якоря, дополнительных полюсов и компенсационной обмотки).
С увеличением нагрузки напряжение U уменьшается по двум причинам:
- из-за падения напряжения во внутреннем сопротивлении ?r машины;
- из-за уменьшения ЭДС E в результате размагничивающего действия реакции якоря.
Величина

В генераторе с параллельным возбуждением (рис. 4.10а) обмотка возбуждения присоединена через регулировочный реостат параллельно обмотке якоря. Для нормальной работы приемников электроэнергии необходимо поддерживать постоянство напряжения на их зажимах, несмотря на изменение общей нагрузки генератора. Это осуществляется посредством регулирования тока возбуждения.
Регулировочной характеристикой генератора (рис. 4.9б) называется зависимость тока возбуждения Iв от тока якоря Iа при постоянном напряжении U и скорости n. Такая характеристика показывает, как надо изменять ток возбуждения для того, чтобы при изменениях нагрузки поддерживать постоянство напряжения на зажимах генератора. Эта кривая сначала почти прямолинейна, но затем загибается вверх от оси абсцисс, вследствие влияния насыщения магнитопровода машины. Следовательно, в машине используется принцип самовозбуждения, при котором обмотка возбуждения получает питание непосредственно от самого генератора.
а)
б)
Рис. 4.10. Принципиальная схема генератора с параллельным возбуждением (а); характер изменения ЭДС и тока возбуждения генератора в процессе возбуждения (б).
Самовозбуждение генератора возможно только при наличии гистерезиса в магнитной цепи.
При вращении якоря в его обмотке потоком остаточного магнетизма индуктируется ЭДС Еост , и по обмотке возбуждения начинает протекать ток. Если обмотка возбуждения включена так, что ее НС Fв направлена согласно с НС остаточного магнетизма, то магнитный поток возрастает, увеличивая ЭДС Е, поток Ф и ток возбуждения Iв. Машина самовозбуждается и начинает устойчиво работать с Iв=const, E=const, зависящими от величины сопротивления Rв цепи возбуждения.
Для режима холостого хода генератора:

где
L – суммарная индуктивность обмоток возбуждения и якоря.
Зависимость e=f(iв) представляет собой характеристику холостого хода генератора ОА, а прямая ОВ – ВАХ сопротивления Rв (tg?= Rв) (рис. 4.10б).
Пока имеется положительная разность (e-iвRв), член

Степень устойчивости рассматриваемого режима будет определяться производной:

где
? – угол пересечения характеристики ОА с прямой ОВ.
При увеличении Rв до критического значения Rв.кр., соответствующего ?кр , угол ??0 и режим самовозбуждения становится неустойчивым, при этом ЭДС генератора уменьшается до Еост. Таким образом, для нормальной работы генератора с параллельным возбуждением необходимо, чтобы Rв<Rв.кр.
Внешняя характеристика генератора с самовозбуждением располагается ниже внешней характеристики генератора с независимым возбуждением (рис. 4.11).
Объясняется это тем, что в рассматриваемом генераторе напряжение уменьшается не только с ростом нагрузки и размагничивающего действия реакции якоря, но и вследствие уменьшения тока возбуждения

 |
Рис. 4.11. Внешние характеристики генераторов с независимым (верхняя кривая) и параллельным (нижняя кривая) возбуждением.
Ток короткого замыкания создается только ЭДС от остаточного магнетизма и составляет (0,4…0,8) Iном.
Работа на участке ab внешней характеристики неустойчива.
Регулировочная характеристика генератора с параллельным возбуждением имеет такой же вид, как и для генератора с независимым возбуждением.
В генераторе с последовательным возбуждением (рис. 4.12а) ток возбуждения Iв=Iа=Iн.
а) б)
Рис. 4.12. Схема генератора с последовательным возбуждением (а) и его внешняя характеристика (б).
Внешняя характеристика (кривая 1) и характеристика холостого хода (кривая 2) изображены на рис. 4.12б. Ввиду того, что в генераторе с последовательным возбуждением напряжение сильно изменяется при изменении нагрузки, такие генераторы практически не применяются. Их используют лишь при электрическом торможении двигателей с последовательным возбуждением, которые при этом переводятся в генераторный режим.
В генераторе со смешанным возбуждением имеются две обмотки возбуждения: основная (параллельная) и вспомогательная (последовательная). Наличие двух обмоток при их согласном включении позволяет получать приблизительно постоянное напряжение генератора при изменении нагрузки. Подбирая число витков последовательной обмотки так, чтобы при номинальной нагрузке создаваемое ею напряжение ?Uпосл компенсировало суммарное падение напряжения ?U при работе машины с одной только параллельной обмоткой, можно добиться, чтобы напряжение U при изменении тока нагрузки от нуля до Iном оставалось практически неизменным.
Генераторы постоянного тока имеют большей частью параллельное возбуждение. Обычно для улучшения внешней характеристики они снабжаются небольшой последовательной обмоткой (1-3 витка на полюс). При необходимости такие генераторы могут включаться и по схеме с независимым возбуждением.
Генераторы с независимым возбуждением используются только при большой мощности и низком напряжении. В этих машинах независимо от величины напряжения на якоре обмотка возбуждения рассчитывается на стандартное напряжение постоянного тока 110 или 220 В с целью упрощения регулирующей аппаратуры.
4.5. Двигатели постоянного тока
Так же как и генераторы, двигатели классифицируются по типу возбуждения: с параллельным (шунтовые), последовательным (сериесные) и смешанным (компаундные) возбуждением.
При работе машины постоянного тока в двигательном режиме U>E, поэтому


В двигателе с параллельным возбуждением (рис. 4.13а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети.
0
Рис. 4.13. Схема двигателя с параллельным возбуждением (а) и его механические характеристики (б).
Если пренебречь размагничивающим действием реакции якоря, то можно считать, что магнитный поток двигателя не зависит от тока нагрузки. В этом случае механическая характеристика двигателя ?=f(M) будет линейной.

где


Сумма сопротивлений (

В этом случае они называются естественными характеристиками. При включении добавочного сопротивления rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2,3,4, соответствующих различным значениям rn (рис. 4.13б). Чем больше rn , тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче. Современные двигатели с параллельным возбуждением снабжаются небольшой последовательной обмоткой возбуждения, которая передает механической характеристике необходимый угол наклона. НС этой обмотки при токе Iном составляет до 10 % от НС параллельной обмотки.
Регулировочный реостат rр.в позволяет изменять ток возбуждения двигателя Iв и тем самым его магнитный поток. Согласно выражению ?=f(Ф) при этом будет изменяться и скорость вращения двигателя. В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, т.к. при разрыве этой цепи и небольшой нагрузке на валу скорость двигателя резко возрастает (он идет в «разнос»). При этом сильно увеличивается ток якоря и возникает круговой огонь на коллекторе машины.
В двигателе с последовательным возбуждением (рис. 4.14а) ток возбуждения равен току якоря: Iв=Iа , поэтому магнитный поток Ф является функцией тока нагрузки Iа. Характер этой функции изменяется в зависимости от величины нагрузки. При Ia<(0,8…0,9) Iном, когда магнитная система ненасыщенна, Ф=кфIа , причем коэффициент пропорциональности Кф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании нагрузки поток Ф растет медленнее, чем Ia , и при больших нагрузках (Ia>Iном) можно считать, что Ф=const. В соответствии с этим изменяются и зависимости n=f(Ia), M=f(Ia) (рис. 4.14б).
а) б)
Рис.4.14. Схема двигателя с последовательным возбуждением (а) и зависимости его момента и скорости вращения от тока якоря (б).


Кроме естественных характеристик 1, можно путем включения добавочных сопротивлений rn в цепь якоря получить семейство реостатных характеристик 2, 3, и 4. Чем больше величина rn, тем ниже располагается характеристика.
При малых нагрузках скорость n резко возрастает и может превысить максимально допустимое значение (двигатель идет в «разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке. Обычно минимально допустимая нагрузка составляет (0,2…0,25) Iном; только двигатели малой мощности (десятки ватт) используют для работы при холостом ходе. Применение ременной передачи или фрикционной муфты для включения недопустимо.
Двигатели с последовательным возбуждением применяют в тех случаях, когда имеет место изменение нагрузочного момента в широких пределах и тяжелые условия труда.
При жесткой характеристике скорость вращения n почти не зависит от момента М, поэтому мощность:

где С4 – постоянная.
При мягкой характеристике двигателя n обратно пропорционально


где

Поэтому при изменении нагрузочного момента в широких пределах мощность Р2 , а, следовательно, мощность Р1 и ток Ia изменяются у двигателей с последовательным возбуждением в меньших пределах, чем у двигателя с параллельным возбуждением, кроме того, они лучше переносят перегрузки.
В двигателе со смешанным возбуждением магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения - параллельной и последовательной. Поэтому его механическая характеристика располагается между характеристиками двигателей с параллельным и последовательным возбуждением (рис. 4.15).
Достоинством двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его скорость холостого хода n0 имеет конечное значение.
 |
Рис.4.15. Механические характеристики двигателя со смешанным возбуждением.
5. Информационные машины
К числу информационных машин относятся: поворотные трансформаторы, сельсины, магнесины и асинхронные тахогенераторы.
5.1. Поворотный трансформатор
Поворотными трансформаторами называют электрические машины переменного тока, преобразующие угол поворота ? в напряжение, пропорциональное некоторым функциям этого угла или самому углу. В зависимости от закона изменения выходного напряжения они подразделяются на следующие типы:
а) синусно – косинусный трансформатор, позволяющий получить на выходе два напряжения, одно из которых пропорционально sin?, а второе cos?;
б) линейный поворотный трансформатор, выходное напряжение которого пропорционально углу ?;
в) трансформатор – графопостроитель, выходное напряжение которого связано с подаваемыми первичными напряжениями зависимостью:

где
С – постоянная.
Для получения поворотных трансформаторов различных типов может быть использована одна и та же машина с двумя обмотками на статоре и двумя на роторе при различных способах включения обмоток.
Поворотные трансформаторы широко используются в автоматических и вычислительных устройствах для решения геометрических и тригонометрических задач. В системах автоматического регулирования они используются в качестве измерителей рассогласования.
Конструктивно поворотный трансформатор выполняется так же, как асинхронный двигатель с фазным ротором. На статоре и роторе расположены по две одинаковые однофазные распределенные обмотки, сдвинутые между собой в пространстве на 90 градусов. Магнитопровод – шихтованный.
Поворотный трансформатор может работать в режиме поворота ротора или в режиме вращения.
В первом случае положение ротора относительно статора задается поворотным механизмом (рис. 5.1).
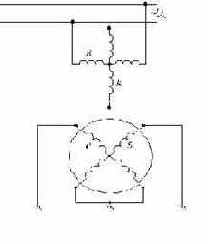
Рис. 5.1. Принципиальная схема четырехобмоточного поворотного трансформатора.
В этом режиме одна из статорных обмоток – обмотка возбуждения В – присоединяется к сети переменного тока, а другая – компенсационная или квадратурная обмотка К – подключается к некоторому сопротивлению или замыкается накоротко. В некоторых случаях обе статорные обмотки получают питание от независимых источников переменного напряжения. Обмотка ротора S (синусная) и С (косинусная) присоединяются к контактным кольцам. Для уменьшения числа колец концы двух обмоток объединяются. Применяется так же токосъем с помощью спиральных пружин; в этом случае угол поворота ротора ограничен 1,8…2 оборотами.
При работе в режиме вращения обмотки возбуждения и компенсации с целью уменьшения числа контактных колец размещают на роторе, а синусную и косинусную – на статоре. При этом компенсационная обмотка замыкается накоротко, а выводы обмотки возбуждения подключаются к двум контактным кольцам.
Принцип действия. При подключении обмотки возбуждения В к сети переменного тока в машине возникает продольный магнитный поток Фd, пульсирующий во времени с частотой сети. При холостом ходе в обмотках ротора S и С этот поток будет наводить ЭДС Еs0 и Ec0, частота которых равна частоте сети f1, а действующее значение будет зависеть от положения ротора относительно статора (рис. 5.2а).
а) б)
 |
Рис. 5.2. Схематический разрез поворотного трансформатора (а) и график распределения индукции вдоль окружности его статора и ротора (б).
Предположим, что магнитный поток Фd распределен в воздушном зазоре синусоидально; в этом случае индукция в воздушном зазоре изменяется вдоль окружности статора и ротора по закону (рис. 5.2б):

где
Вср – индукция в воздушном зазоре по оси обмотки В.
В обмотке статора В поток Фd индуктирует ЭДС:

где
Фdm – максимальное значение потока:

Здесь
l1 – продольная длина статора (ротора);

Предположим, что ось фазы С обмотки ротора сдвинута относительно фазы В обмотки статора на некоторый угол


а ЭДС, индуцированная в этой обмотке

где

Из соотношения

выходное напряжение косинусной обмотки при холостом ходе

Обмотка ротора S сдвинута относительно обмотки С на угол ?/2 , следовательно, выходное напряжение в этой обмотке

Обмотка К с потоком Фd не связана и он не индуктирует в ней ЭДС. Она используется для компенсации поперечных потоков, создаваемых обмотками ротора при нагрузке поворотного трансформатора. Если вместо обмотки В присоединить к сети переменного тока обмотку К, то она создаст поперченный поток, по отношению к которому обмотка S будет косинусной, а обмотка С – синусной. Таким образом, в обмотках ротора при холостом ходе индуктируются ЭДС, пропорциональные синусу и косинусу угла поворота ротора относительно соответствующего потока. Применяя различные схемы включения обмоток статора и ротора, можно получить и другие функциональные зависимости, а так же уменьшить погрешности, вызываемые током нагрузки.
5.1.1. Синусно – косинусный поворотный трансформатор.
При подключении к синусной обмотке S нагрузки


где

Ток IHS создает НС ротора, максимальное значение которой

Рис. 5.3. Векторная диаграмма НС при подключении нагрузки к синусной обмотке.
Как видно из рис. 5.3 ось этой НС совпадает с осью фазы S, поэтому ее можно представить в виде векторной суммы двух составляющих: продольной Fsd=Fssin? и поперечной Fsq=Fscos?. Продольная составляющая Fsd создает в обмотке возбуждения В компенсирующий ток, НС которого FB , так же, как и в обычном трансформаторе, компенсирует действие Fsd . Результирующий продольный поток Фd индуцирует в обмотке S ЭДС

Поперечная составляющая Fsq создает в поворотном трансформаторе поперечный поток Фq , максимальное значение которого

где

По отношению к поперечному потоку Фq обмотка S является косинусной и, следовательно, в ней индуцируется ЭДС

ЭДС Еsq можно представить в виде:

где

- реактивное сопротивление обмотки ротора.
Таким образом, при нагрузке в синусной обмотке S продольным и поперечным потоками индуктируется результирующая ЭДС

Следовательно, ЭДС, индуцированная в синусной обмотке будет иметь вид:

Решив это уравнение относительно


где

Аналогично можно получить выражение для ЭДС, индуцированной в косинусной обмотке:

где



Таким образом, при наличии тока нагрузки




где




Действительная часть комплексов





 |
Рис. 5.4. Зависимость выходного напряжения






На рис. 5.4 показаны зависимости Us=f(?) при холостом ходе (кривая 1) и при нагрузке (кривые 2 и 3), построенные по вышеуказанным формулам. При этом кривые 2 и 3 соответствуют значениям As, равным 0,25 и 1. Из этих кривых следует, что при нагрузке погрешность поворотного трансформатора может быть весьма значительной. Зависимости амплитудной погрешности ?Us от угла поворота ? для указанных значений модуля комплекса As изображены на рисунке кривыми 4 и 5.
Исследование выражений для

Для устранения погрешности поворотного трансформатора, обусловленной поперечным потоком Фq , применяют так называемое симметрирование трансформатора, т.
е. компенсацию поперечного потока ротора. Существуют два способа симметрирования: вторичное (со стороны ротора) и первичное (со стороны статора).
Вторичное симметрирование. Уменьшить погрешность выходного напряжения, снимаемого с синусной обмотки, можно, если подключить к косинусной обмотке сопротивление
В этом случае ток, проходящий по обмотке С, создает намагничивающую силу, максимальное значение которой

а) б)
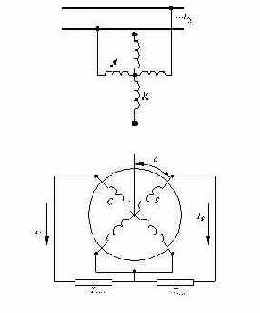
Рис. 5.5. Схема синусно-косинусного трансформатора о вторичным симметрированием (а) и диаграмма МДС, создаваемых обмотками ротора (б).
НС Fc можно представить, как и НС Fs , в виде векторной суммы двух составляющих: продольной Fcd=Fccos? и поперечной Fcq=Fcsin?. Продольная составляющая Fcd совпадает по направлению с Fsd, а поперечная составляющая Fcq направлена против Fsq. При равенстве Fcq =Fsq поперечный поток Фq будет равен нулю. Следовательно, не будет и погрешности, обусловленной этим потоком.
Величину

или

или

Так как поперечный поток Фq равен нулю, то

Следовательно

Откуда

Т.е. при равенстве результирующих сопротивлений обеих фаз ротора ток IB в обмотке возбуждения поворотного трансформатора не зависит от угла поворота ротора, т. к. в выражении для результирующей продольной составляющей НС ротора


или

где


Недостатком этого метода симметрирования является то, что практически он применим только при неизменном сопротивлении нагрузки.
Первичное симметрирование. Если нагрузка подключена только к одной из обмоток ротора, например к обмотке S (рис. 5.6а), то НС ротора по поперечной оси не равна нулю.
а) б)
Рис. 5.6. Схемы синусно – косинусных поворотных трансформаторов с первичным (а) и первичным и вторичным симметрированием (б).
Для уменьшения поперечного потока компенсационную обмотку К статора замыкают на какое-либо малое сопротивление


где

- НС, создаваемая компенсационной обмоткой.
Так как обмотка К по отношению к поперечному потоку Фq представляет собой замкнутую накоротко вторичную обмотку трансформатора, то результирующая НС




при заданном напряжении




Рассмотренные методы компенсации поперечного потока Фq могут быть применены при использовании в качестве рабочей обмотки как синусной, так и косинусной обмоток. Поэтому поворотный трансформатор, подключенный по схеме рис. 5.6б, называют синусно – косинусным.
5.1.2. Линейный поворотный трансформатор
Выбирая определенным образом схемы включения обмоток поворотного трансформатора, можно получить зависимость выходного напряжения от входного угла поворота, в некотором ограниченном диапазоне изменения угла поворота


Диапазон изменения угла


где

Для реализации зависимости (5.1.33) применяют две схемы соединения обмоток поворотного трансформатора: с первичным симметрированием (на статоре) (рис. 5.7а) и с вторичным симметрированием (на роторе) (рис. 5.7б).
Рис. 5.7. Схема линейного поворотного трансформатора: а) с первичной компенсацией, б) со вторичной компенсацией.
В схеме первичного симметрирования линейного поворотного трансформатора (рис. 5.7а)
компенсационная обмотка замыкается накоротко, поперечный поток при этом равен


Так как ЭДС, индуктированные в косинусной обмотке и обмотке возбуждения совпадают по фазе, то они будут складываться алгебраически.
Поэтому с учетом (5.1.3) и (5.1.6) сумма


Следовательно, согласно (5.1.8) ЭДС, индуктируемая в выходной обмотке S определится выражением:

Пренебрегая падениями напряжения в активных сопротивлениях синусных и косинусных обмоток, а также в активном сопротивлении обмотки возбуждения и принимая

получим окончательное выражение для выходного напряжения линейного поворотного трансформатора:

В линейных поворотных трансформаторах с симметрированием по первичной обмотке изменение нагрузки


В схеме линейного поворотного трансформатора с вторичным симметрированием (рис.5.7б) при изменении нагрузки нарушается условие симметрирования и возникают значительные отклонения от линейной зависимости. Поэтому эту схему применяют сравнительно редко.
5.2. Сельсины
Сельсинами (от слов self sinchroniring – самосинхронизирующийся) называют индукционные машины, обеспечивающие синхронный и синфазный поворот или вращение двух или нескольких осей, механически не связанных между собой. Одна из таких машин механически соединена с ведущей осью и называется датчиком, а другая – с ведомой осью и называется приёмником.
Сельсины имеют две обмотки: возбуждения и синхронизации. Различают одно- и трёхфазные сельсины, обмотка синхронизации у обоих - трехфазная. В системах автоматики наибольшее распространение получили однофазные сельсины, которые бывают контактными и бесконтактными.
Однофазный сельсин представляет собой асинхронную машину, в которой обмотка возбуждения создает пульсирующий поток, индуцирующий в трех фазах обмотки синхронизации ЭДС. Величина этих ЭДС зависит от угла поворота датчика (ротора)

Различают два режима работы сельсинов: индикаторный и трансформаторный.
Индикаторный режим используется при отсутствии другого исполнительного двигателя. Синхронизирующий момент между валами сельсина- датчика и сельсина- приемника создается при наличии некоторого пространственного угла


В трансформаторном режиме к ведомой оси приложен значительный момент сопротивления. Поэтому угол рассогласования
Требования, предъявляемые к сельсинам: статическая и динамическая точность передачи угла; удельный синхронизирующий момент, т.е.
момент, приходящийся на 10 поворота ротора; максимальный синхронизирующий момент при наибольшем угле рассогласования; максимальная скорость вращения сельсинов и время успокоения ротора приемника при скачке поворота ротора датчика.
В зависимости от класса точности статическая ошибка сельсинов составляет ±0,25..2,50.
Устройство сельсинов. Однофазные сельсины, по существу, являются асинхронными машинами малой мощности. Они бывают явнополюсными (индикаторные) и неявнополюсными (трансформаторные). В явнополюсных сельсинах однофазная обмотка возбуждения располагается на явно выраженных полюсах ротора или статора. Обмотка синхронизации всегда выполняется распределенной и располагается в пазах статора или ротора; фазы её соединяются в звезду.
Сельсины выполняются двухполюсными, для того, чтобы обеспечить самосинхронизацию в пределах одного оборота.
Число контактных колец и щеток зависит от места расположения обмоток: сельсины с обмоткой возбуждения на роторе имеют два контактных кольца; с обмоткой возбуждения на статоре – три контактных кольца. В некоторых типах сельсинов применяются электрические или механические демпферы, обеспечивающие быстрое затухание собственных колебаний ротора при переходе его из одного положения в другое.
Для повышения надежности в настоящее время широко применяются бесконтактные сельсины с однофазной обмоткой возбуждения и трехфазной обмоткой синхронизации, расположенными на статоре, вследствие чего отпадает необходимость в скользящих контактах. Недостатком бесконтактных сельсинов является худшее использование материалов из – за больших потоков рассеяния и тока холостого хода. При одинаковых синхронизирующих моментах вес бесконтактного сельсина примерно в 1,5 раза больше, чем контактного.
Трансформаторный режим однофазных сельсинов. Рассмотрим работу однофазных
сельсинов на примере контактных сельсинов с обмоткой возбуждения на статоре. Полученные выводы в одинаковой мере могут быть распространены как на контактные сельсины с обмоткой возбуждения на роторе, так и на бесконтактные сельсины.
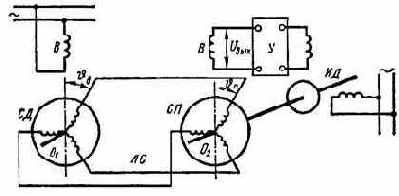
Рис. 5.8. Схема включения сельсинов при работе в трансформаторном режиме.
Переменный ток, проходящий по обмотке возбуждения сельсина- датчика (рис. 5.8), создает в нем пульсирующий магнитный поток, который индуктирует ЭДС в трех фазах обмотки синхронизации. Токи, протекающие от действия этих ЭДС в обмотках синхронизации сельсина – приемника создадут свой пульсирующий магнитный поток. Направление оси этого потока зависит от углового положения ротора приемника. Если при этом в сельсине – приемнике возникает продольная составляющая потока, то она индуцирует в его обмотке возбуждения ЭДС, являющуюся выходным напряжением, подаваемым после усиления на исполнительный двигатель, который поворачивает ведомую ось О2 ротора приемника. Когда ось магнитного потока, создаваемого ротором сельсина – приемника станет перпендикулярной оси обмотки возбуждения, выходное напряжение станет равным нулю и вращение ведомой оси прекратится.
Следовательно, для работы системы необходимо, чтобы ток в роторе сельсина – приемника создавал продольную составляющую магнитного потока. В согласованном положении роторов продольная составляющая магнитного потока сельсина – приемника отсутствует.
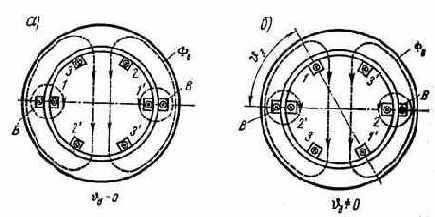
Рис. 5.9. Ротор и статор сельсина-датчика при


Обмотка возбуждения В сельсина – датчика создает магнитный поток ФВ, синусоидально распределенный вдоль окружности статора и ротора и пульсирующий с частотой сети. Величина ЭДС, индуктируемая этим потоком, в каждой фазе обмотки ротора датчика зависит от ее положения относительно оси обмотки возбуждения. Если ось первой фазы ротора – датчика совпадает с осью обмотки возбуждения (рис. 5.9а) то

В общем случае, когда ось первой фазы ротора сдвинута относительно обмотки возбуждения на угол

Так как одноименные фазы соединены последовательно, то проходящий по ним ток:

где


Очевидно, что

Считая, что НС отдельных фаз распределены в пространстве синусоидально, получим:

где
F2m=0,9I2mw2 – максимальное значение НС, создаваемой одной фазой обмотки ротора.
Для определения результирующей НС всех трех фаз датчика сложим их составляющие FДd и FДq по продольной оси d (оси обмотки возбуждения) и по поперечной оси q.


Таким образом, результирующая НС ротора датчика может быть представлена пространственным вектором


Намагничивающие силы соответствующих фаз ротора сельсина – приемника будут отличаться от НС фаз ротора датчика только знаком, т. к. ток в фазах обмотки ротора приемника направлен противоположно току в фазах обмотки ротора датчика. Поэтому результирующая НС сельсина – приемника также может быть представлена пространственным вектором


Продольная и поперечная составляющие этой силы:


Знак “-” в этих выражениях указывает, что вектор результирующей НС
поворачивается в противоположную сторону по отношению к НС ротора датчика.
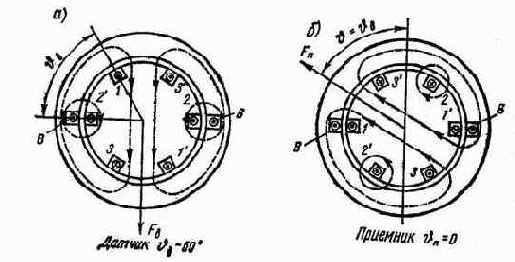
Рис. 5.10. Векторы МДС ротора в датчике