Продольная составляющая НС ротора

где
E1m – действующее значение ЭДС в выходной обмотке в случае, когда вектор НС совпадает с осью этой обмотки.
Обычно удобнее иметь при согласованном положении приемника и датчика нулевой сигнал. Поэтому ротор и статор сельсина приемника при согласованном положении ведущей и ведомой осей предварительно смещают на 900 относительно ротора или статора сельсина – датчика. В этом случае выходной сигнал изменяется по закону

При выборе сельсина, предназначенного для трансформаторного режима работы, важно знать величину удельного выходного напряжения, т.е. величину Uвых, приходящую на 10 угла рассогласования:

Эта величина обычно приводится в паспорте сельсина. Для того, чтобы зависимость выходного сигнала Uвых от угла рассогласования

Индикаторные режимы работы однофазных сельсинов. В этом режиме на валу сельсина – приемника имеется незначительный момент сопротивления, поэтому для поворота ротора приемника вслед за поворотом ротора датчика требуется небольшой вращающий момент, который может быть получен от самого сельсина – приемника без дополнительных усилительных устройств.
Схема включения сельсинов для индикаторного режима имеет вид (рис. 5.11):
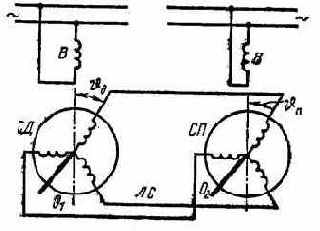
Рис. 5.11. Схема включения сельсинов при работе их в индикаторном режиме.
Пульсирующие магнитные потоки, создаваемые обмотками возбуждения датчика и приемника, индуктируют в трех фазах обмоток синхронизации ЭДС. Если между роторами датчика и приемника имеется некоторый угол рассогласования
Эти моменты имеют противоположные направления и стремятся свести к нулю угол рассогласования. Обычно ротор датчика заторможен, поэтому его синхронизирующий момент воспринимается механизмом, поворачивающим ведущую ось О1; синхронизирующий же момент приемника поворачивает его ротор в ту же сторону и на тот же угол, на который поворачивается ротор датчика.
В трех фазах обмотки синхронизации датчика потока возбуждения Фв индуцирует ЭДС:

Так как обмотка возбуждения приемника присоединена к той же сети однофазного тока, то в фазах его обмотки синхронизации будет индуцироваться ЭДС:

В виду того, что ЭДС в одноименных фазах датчика и приемника направлены по контуру, образованному проводами линии связи, встречно, токи в фазах датчика и приемника:

Представим ток в фазах обмоток синхронизации в виде двух составляющих:

где составляющая со «штрихом» обусловлены наличием ЭДС EД в обмотках датчика, а «два штриха» – ЭДС En в обмотках приемника. Это позволяет при определение НС в датчике и приемнике воспользоваться результатами, полученными для дифференциального режима работы сельсинов.
Составляющие токов



направленную по продольной оси, а в приемнике НС-

продольная и поперечная составляющие которой равны

Составляющие же токов



направленную по продольной оси, а в датчике НС


.
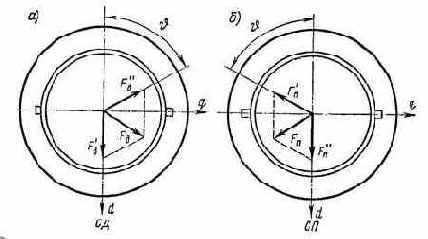
Рис. 5.12. Составляющие векторов НС ротора FД и FП в датчике (а) и в приемнике (б), обусловленные действием ЭДС ЕД и ЕП.
При этом результирующие НС (рис. 5.12) будeт иметь следующие составляющие:
В датчике

в приемнике

При
При наличии угла рассогласования появляются токи и НС ротора, величины которых в датчике и приемнике одинаковы:

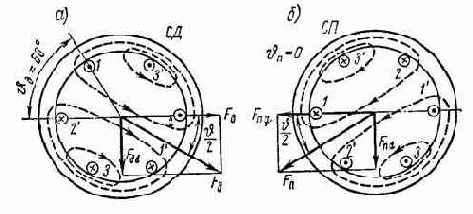
Рис. 5.13. Положение векторов НС ротора FД и FП в датчике (а) и в приемнике (б) при повороте ротора датчика на угол

На рис. 5.13 показаны токи и НС датчика и приемника при угле рассогласования датчика



Продольные составляющие FДd и Fnd НС ротора датчика и приемника создают в обеих обмотках возбуждения компенсационные токи (аналогично трансформатору), НС которых компенсирует действие НС FДd и Fnd. Поперечные же составляющие FДq и Fnq, оставшиеся нескомпенсированными, взаимодействуют с потоком статора, создавая в датчике и приемнике синхронизирующие моменты.
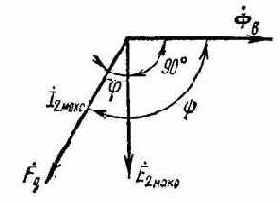
Рис. 5.14. Векторная диаграмма для ротора сельсина-приемника.
Векторная диаграмма для ротора сельсина (рис. 5.14) подобна векторной диаграмме для ротора асинхронного двигателя. Поперечная составляющая



Величину и направление синхронизирующего момента можно определить также, как и в обычной асинхронной машине, считая, что момент создается активной составляющей ротора. Это наглядно показано на рис. 5.15,
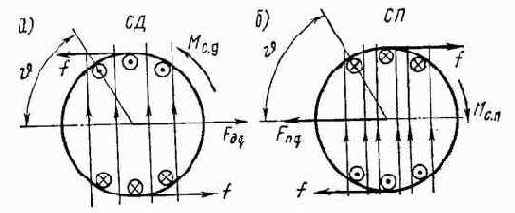
Рис. 5.15. Схема возникновения синхронизирующего момента в датчике (а) и в приемнике (б).
где крестиками и точками показано направление составляющих тока ротора, соответствующих некомпенсированным поперечным НС FДq и Fnq. Из рис. 5.15 следует, что синхронизирующие моменты в датчике и приемнике направлены в противоположные стороны и стремятся повернуть оба ротора в согласованное положение. На ротор датчика действует момент Мc.Д., стремящийся возвратить ротор в исходное положение, а на ротор приемника - момент Мc.n, увлекающий его в сторону поворота ротора датчика.
Мгновенное значение синхронизирующего момента:

где С и С1 – постоянные.
Следовательно, при заданном угле рассогласования
Среднее значение синхронизирующего момента:

Принимая sinj=const и обозначая


Таким образом, средняя величина синхронизирующего момента пропорциональна синусу угла рассогласования. Для того, чтобы сельсины обладали свойством самосинхронизации в пределах одного оборота, их обычно выполняют двухполюсными так, что геометрический угол поворота ротора
Из рис. 5.16а, следует, что синхронизирующий момент равен нулю при углах рассогласования
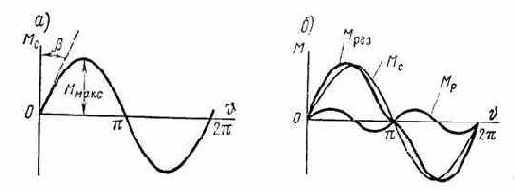
Рис. 5.16. Зависимости синхронизирующего момента от угла рассогласования в сельсинах с неявновыраженными (а) и явновыраженными (б) полюсами
Величина максимального синхронизирующего момента Mm зависит от произведения
F2m sinj. Так как



где
A и B – постоянные;
UB – напряжение, подаваемое на обмотку возбуждения сельсинов.
Z2,r2 и x2 – суммарное, активное и индуктивное сопротивления последовательно включенных фаз датчика и приемника (для сельсинов с явновыраженными полюсами (рис. 5.16б) берут значения Z2 и x2 приведенные к поперечной оси сельсина).
Взяв производную момента Mm по x2 и прировняв её нулю, можно определить значение x2, при котором этот момент имеет наибольшую величину:

отсюда x2= r2.
Таким образом, для получения наибольшей величины Mm необходимо иметь равные индуктивное и активное сопротивления ротора сельсина.
Важной характеристикой сельсина является удельный синхронизирующий момент (момент, приходящийся на 10 угла рассогласования).

Часто этим термином обозначают также крутизну S нарастания синхронизирующего момента в начальной части характеристики M=¦(

Момент


Для увеличения удельного синхронизирующего момента при малых углах рассогласования сельсины, предназначенные для работы в индикаторном режиме, выполняются, как правило, с сосредоточенной обмоткой возбуждения и явно выраженными полюсами на статоре.
Благодаря этому появляется дополнительный реактивный момент Мр, который усиливает результирующий удельный синхронизирующий момент примерно на 10..20 %.
Возникновение реактивного момента можно объяснить притяжением ротора, являющегося электромагнитом, к выступающим полюсам статора (рис. 5.17).
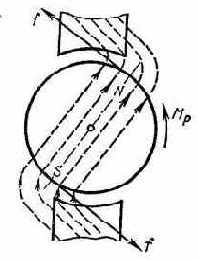
Рис. 5.17. Схема возникновения реактивного момента.
Погрешность в сельсинах. Погрешность при работе сельсинов в индикаторном и трансформаторном режимах вызываются электрической, магнитной и механической асимметрией датчика и приемника, обусловленными технологическими причинами, влиянием высших гармоник в кривой НС ротора, влиянием сопротивления линии связи, изменением напряжения питающей сети и др. Кроме того, при работе сельсинов в трансформаторном режиме погрешность в работе сельсинов может быть вызвана тормозным моментом на валу приемника.
Устранить технологические погрешности можно, обеспечив высокую точность штамповки листов ротора и статора и сборки их пакетов, строгую концентричность цилиндрических поверхностей ротора и статора (равномерность воздушного зазора, тщательную балансировку ротора и пр.). Уменьшить высшие гармоники в кривой НС ротора можно применением синусных (точных) обмоток. При работе сельсинов в трансформаторном режиме весьма важно, чтобы при
В тех случаях, когда датчик удален на значительное расстояние от приемника, сопротивление линии связи становится соизмеримым с собственным сопротивлением обмоток синхронизации. Это приводит к уменьшению тока в обмотках синхронизации датчика и приемника, вследствие чего уменьшается выходное напряжение

Для уменьшения влияния контактов на работу сельсинов и снижения трения в их подвижных частях стремятся по возможности уменьшить число скользящих контактов.
С этой целью обмотку синхронизации, в большинстве случаев, располагают на статоре, а возбуждения – на роторе. Тогда изменение переходного сопротивления контактов мало сказывается на точности работы системы передачи угла; выход их из строя не приводит к полному нарушению работы системы (в этом случае сельсин – приемник работает как синхронный реактивный двигатель). Недостатком сельсинов с обмоткой возбуждения на роторе является то, что ток через скользящие контакты проходит у них постоянно, в то время как у сельсинов с обмоткой возбуждения на статоре контакты пропускают ток только в момент отработки угла. Однако токи возбуждения сельсинов обычно малы, поэтому надежность работы сельсинов с обмоткой возбуждения на роторе будет значительно выше, чем при расположении её на статоре.
Если сельсины работают в индикаторном режиме, то при значительных расстояниях между датчиком и приемником напряжение, подводимые к их обмоткам возбуждения, могут несколько отличаться по величине и фазе. В этом случае даже при согласованном положении роторов датчика и приемника по обмоткам синхронизации будет проходить ток и возникает определенная погрешность. Для её устранения в цепь возбуждения одной из машин включают дополнительное активно-индуктивное сопротивление, с помощью которого выравнивают по величине и фазе напряжения, подводимые к обмотке возбуждения.
При работе сельсинов в трансформаторном режиме выходная обмотка приемника обычно включается на высокоомный вход усилителя. В этом случае ток в обмотке очень мал и можно сказать, что Uвых@Eвых. Однако, если сопротивление нагрузки Zн не очень велико, то ток нагрузки


где
Z1 – сопротивление обмотки статора, то выходное напряжение

Таким образом, с увеличением нагрузки выходное напряжение (при одном и том же угле рассогласования) уменьшается. Кроме того, при большой нагрузке возникает реакция выходной обмотки, приводящая к таким же искажениям зависимости Uвых=¦(
При работе сельсинов в индикаторном режиме тормозной момент на валу приемника создает довольно существенную погрешность. Так как тормозной момент, создаваемый нагрузкой, в рассматриваемом режиме обычно весьма мал; основное влияние на точность передачи угла оказывает трение в подшипниках приемника и трение щеток о контактные кольца. Погрешность, вызванная моментом трения Мтр сельсина – приемника, характеризует его зону нечувствительности D
Величина этой зоны определяется отношением

чем больше величина


Ток в фазе ротора при индивидуальном питании от датчика одного приемника

а при групповом питании нескольких приемников

Так как максимальный синхронизирующий момент пропорционален НС


То есть погрешность каждого приемника будет больше, чем при индивидуальном питании. Чтобы не допустить увеличение погрешности обычно при групповом питании в качестве датчика используют сельсин с уменьшенным сопротивлением, то есть применяют для этой цели сельсин большей мощности.
В режиме непрерывного вращения сельсинов помимо рассмотренных выше трансформаторных ЭДС в фазах обмотки ротора, датчика и приемника возникают ЭДС вращения, которые по мере роста скорости вращения n уменьшают синхронизирующий момент. Величину динамического синхронизирующего момента в режиме вращения


где


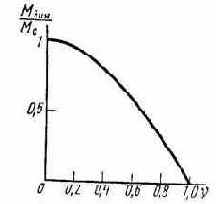
Рис. 5.18. Зависимость динамического синхронизирующего момента от относительной скорости

Обычно при


В зависимости от величины допускаемой погрешности сельсины подразделяются на три класса точности (1,2 и 3). При работе сельсинов в индикаторном режиме погрешность датчика значительно меньше, чем у приемника, так как на последнюю погрешность сильно влияет момент трения. При работе в трансформаторном режиме момент трения приемника воспринимается исполнительным двигателем, поэтому погрешность сельсинов в этом режиме меньше, чем в индикаторном.
5.2.1. Сельсины с одной обмоткой синхронизации.
Для индикаторной передачи угла могут быть использованы сельсины с одной обмоткой на роторе, называемые одноосными (рис.5.19).
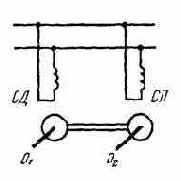
Рис. 5.19. Схема включения одноосных сельсинов.
Если оси обмоток ротора датчика и приемника образуют с осью обмотки статора углы, равные соответственно

Подставляя значения
2
получаем


Намагничивающая сила, создаваемая обмоткой ротора, будет пропорциональна току I2:

Синхронизирующий момент можно определить, как и в сельсине с трехфазной обмоткой по выражению:

Так как в данном случае поперечные составляющие НС ротора датчика и ротора приемника:

то формулы для синхронизирующих моментов датчика и приемника будут иметь вид:

Из этих выражений следует, что величина синхронизирующего момента сельсина приемника зависит не только от угла рассогласования, но и от положения ротора приемника. При
5.2.2. Дифференциальные сельсины.
Дифференциальный сельсин используется в тех случаях, когда требуется поворачивать ведомую ось О2 на угол, равный сумме или разности углов поворота двух ведущих осей О1 и O1/ (рис. 5.20).
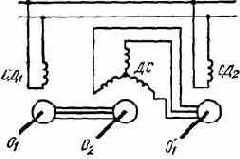
Рис. 5.20. Схема включения дифференциального сельсина.
В этом случае с ведущими осями механически связаны два сельсина – датчика СД1 и СД2, а с ведомой осью – дифференциальный сельсин ДС. Сельсины – датчики выполнены обычным образом, т. е. имеют однофазную обмотку возбуждения и трехфазную обмотку синхронизации. Конструкция же дифференциального сельсина подобна трехфазному асинхронному двигателю: он имеет на статоре и роторе по три распределенных обмотки, оси которых сдвинуты между собой на 1200; обмотка статора присоединена к обмотке синхронизации датчика СД1, а обмотка ротора – к обмотке синхронизации датчика СД2.
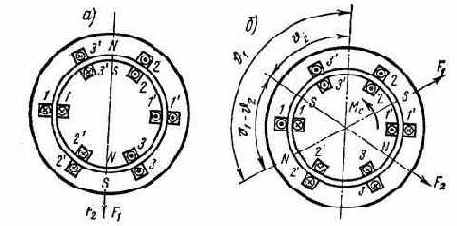
Рис. 5.21. Векторы НС ротора (а) и статора (б) в дифференциальном сельсине при повороте роторов датчика.
В рассматриваемой схеме при любых углах поворота
5.3. Магнесины
Магнесины являются миниатюрными бесконтактными сельсинами и применяются в системах передачи угла при весьма малых моментах сопротивления на валу приемника (индикаторный режим) и малом расстоянии между датчиком и приемником. Статор магнесина выполнен из листового пермаллоя в виде тороида, на котором намотана спиральная обмотка, подключенная к сети переменного тока (рис. 5.22).
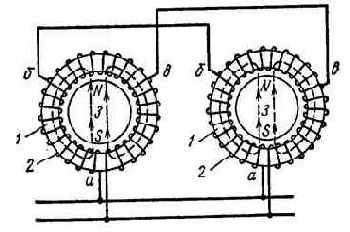
Рис. 5.22. Схема включения магнесина.
Эта обмотка имеет два вывода расположенных под углом 1200 относительно друг друга и относительно точек, к которым подключаются питающие провода. Линия связи ЛС (одним из её каналов является питающая сеть) соединяет одноименные точки а, б и в обмоток статора датчика и приемника.
Ротор магнесина представляет собой постоянный магнит цилиндрической формы, намагниченный по диаметру. При питании обмотки статора переменным током, изменяющимся с частотой ¦1, возникает переменный магнитный поток возбуждения Фв, замыкающийся по тороиду (рис. 5.23).
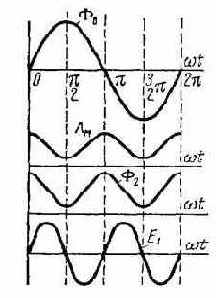
Рис. 5.23. Графики изменения во времени магнитных потоков




Пермаллой, из которого изготовлен тороид, резко изменяет свою магнитную проницаемость при подмагничивании, т. к. он имеет весьма малую коэрцитивную силу (узкую петлю гистерезиса). Поэтому магнитная проводимость
к. поток возбуждения Фв замыкается по тороиду, минуя ротор.
Магнесины, как и сельсины, обладают свойством самосинхронизации в пределах одного оборота, т. к. роторы их поляризованы. Удельный синхронизирующий момент у них небольшой, но из-за малого веса и небольшой инерции ротора магнесины позволяют на небольших расстояниях передавать угол со сравнительно небольшой погрешностью(1-2,50).
5.4. Трехфазные сельсины
В схемах синхронной связи на трехфазных сельсинах в качестве датчика СД и приемника СП используются два обычных асинхронных двигателя с фазными роторами. Их обмотки статора подключаются к общей трехфазной сети переменного тока, а обмотки ротора соединяются друг с другом через контактные кольца (рис. 5.24).
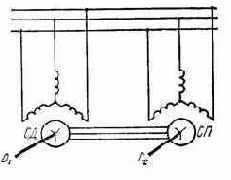
Рис. 5.24. Схема включения трехфазных сельсинов.
При подключении обмоток статора датчика и приемника к сети в сельсинах возникает круговое вращающееся поле, которое индуктирует в одной из фаз ротора датчика ЭДС

а в одноименной фазе ротора приемника – ЭДС

где
приемника.
Знак “+” ставится, если ротор датчика или приемника повернут навстречу вращающемуся полю, а “-”, если он повернут в направлении поля.
При согласованном положении ведущей О1 и ведомой О2 осей, когда углы поворота роторов датчика и приемника равны, ЭДС ЕД и ЕП, индуктированные в одноименных фазах роторов, равны и направлены встречно (рис. 5.25а), вследствие чего по обмоткам роторов ток не протекает. При этом синхронизирующий момент Мс=0.

а) б)
Рис. 5.25. Векторная диаграмма ЭДС и токов для роторной цепи трехфазных сельсинов при отсутствии (а) и при наличии (б) рассогласования.
При появлении угла рассогласования



Этот ток отстает от вектора




При взаимодействии уравнительного тока



где


Если ротор датчика повернут на положительный угол

Характерной особенностью трехфазных сельсинов является то, что синхронизирующие моменты в датчике и приемнике различны, т. к. различны углы

Другим существенным недостатком трехфазных сельсинов является необходимость иметь трехфазный источник питания, поэтому трехфазные сельсины применяются обычно только для синхронного вращения машин большой мощности.
Схема включения трехфазных сельсинов получила название электрического вала (рис.5.26).
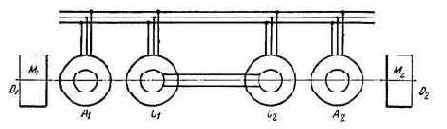
Рис. 5.26. Схема электрического вала.
Рабочие механизмы






5.5. Асинхронный тахогенератор
В идеальном случае тахогенератор должен давать на выходе напряжение U, пропорциональное скорости вращения n:


(

Зависимость U= f(n) называется выходной характеристикой.
Тахогенераторы служат для:
- измерения скорости вращения;
- выработки ускоряющих и замедляющих сигналов;
- выполнения операция дифференцирования.
При измерении скорости вращения обычно допустима погрешность 1÷2,5%.
Наибольшая точность требуется в тахогенераторах, работающих в качестве дифференцирующего звена в вычислительных устройствах. В этом случае ошибка в линейности выходной характеристики не должна превышать 0,05÷0,3% по амплитуде. Помимо основного требования к линейной выходной характеристике к ним предъявляются и другие требования: надежность работы в широком диапазоне изменения температуры, влажности, при вибрации и ударных нагрузках; высокое быстродействие; простота устройства; малые размеры и вес; бесшумность и отсутствие радиопомех.
Наиболее полно этим требованиям удовлетворяет асинхронный тахогенератор с полым немагнитным ротором.
Конструкция его аналогична конструкции асинхронного исполнительного двигателя с полым немагнитным ротором (рис. 5.27).