Механические характеристики
Электромагнитные мощности для полей прямой и обратной последовательностей:


Мощность поля обратной последовательности создает тормозной момент, следовательно, она является отрицательной. Поэтому результирующая мощность двигателя:

Вращающий момент двигателя

Выразим момент в относительных единицах, приняв за базовую величину значение момента




то относительный момент

откуда

По этой формуле строится механическая характеристика исполнительного двигателя в относительных единицах

|
|
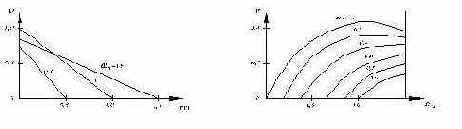
Рис.2.27. Механические (а) и регулировочные (б) характеристики идеализированного двигателя с амплитудным управлением.
С уменьшением



Снижение скорости холостого хода при меньших значениях
Так как в двигателе с полым немагнитным ротором основной составляющей тока статора является ток холостого хода, то ток статора с изменением режима работы двигателя изменяется мало. Мало изменяется и мощность возбуждения, увеличиваясь на 10 – 20% при переходе от режима короткого замыкания к холостому ходу. Мощность управления при амплитудно-фазовом управлении, как и при амплитудном управлении, пропорциональна коэффициенту сигнала и сравнительно мало зависит от скорости вращения. Все другие характеристики (механическая мощность, КПД и др.) при амплитудно-фазовом управлении мало отличаются от характеристик двигателя при амплитудном управлении.
Достоинством амплитудно-фазового управления является сравнительная простота схемы и возможность получения значительных пусковых моментов, недостатком – некоторое снижение устойчивости в зоне малых скоростей.
2.4.9. Электромеханическая постоянная времени исполнительных двигателей
Время разгона исполнительного двигателя определяется, главным образом, электромеханическими переходными процессами, т. к. из-за значительного активного сопротивления электромагнитные переходные процессы в них быстротечны. Электромеханическая постоянная времени




принимает вид

где

Обычно электромеханическую постоянную времени определяют исходя из пускового момента


где

Следовательно, можно записать

или

Решив это уравнение, получим

где
времени:



Физически электромеханическая постоянная времени представляет собой время, необходимое для разгона двигателя от неподвижного состояния до достижения скорости холостого хода при постоянном моменте на валу
В двигателе с амплитудным управлением

где


Поэтому

Из этого выражения следует, что при амплитудном управлении постоянная времени растет с уменьшением эффективного коэффициента сигнала, т. к. уменьшается величина пускового момента. При фазовом управлении


Следовательно, при этом способе управления постоянная времени


Естественно, что время разгона двигателя с уменьшением коэффициента сигнала растет.
Из выражений для постоянной времени




