Зачем гидравлика в машиностроении?
Важнейшей частью почти любого технологического оборудования, станка, пресса, робота и т.д. является привод. Простейшим образом привод можно понимать как совокупность устройств, предназначенных для преобразования и передачи энергии, необходимой для осуществления технологического движения с заданными кинематическими и силовыми характеристиками. В технике широко применяются механический, электрический, пневматический (газовый, чаще всего воздушный) и гидравлический приводы и их комбинации. Важнейшей характеристикой любого привода является крутящий момент (или сила), который он может обеспечивать при одних и тех же размерах или весе. Попытаемся сравнить по этому показателю электрический, пневматический и гидравлический приводы.
Таким образом, можно считать, что между статором и ротором есть какая-то рабочая среда (рабочее тело), которая, упираясь в статор, толкает ротор. В электродвигателе это электромагнитное поле, в пневматическом двигателе это воздух, в гидродвигателе это жидкость. Чем больше сила отталкивания, тем больший крутящий момент развивает двигатель. Величина силы отталкивания зависит от того, как сильно сжата рабочая среда, т.е. от того, каковы внутренние напряжения рабочей среды.
Для любого двигателя (с некоторыми, непринципиальными допущениями) можно считать, что крутящий момент описывается функцией вида

где L – длина отталкивания ротора от статора,
r – радиус ротора,
? – радиальный зазор между ротором и статором,
P – напряжённость рабочей среды,
Z – количество пар элементов, взаимодействующих в процессе отталкивания ротора от статора (пары полюсов, пластины гидро- или пневмодвигателя и т.п.).
Опираясь на эту функцию, легко определить предельно возможные максимальные напряжения для любого двигателя как отношение развиваемого им крутящего момента к его геометрическим размерам.
Это формула будет иметь вид:

Величина P будет выражаться в единицах напряженности рабочей среды Н/м2.
Если таким способом проанализировать двигатели всех трёх типов, разделив их максимальные крутящие моменты на соответствующие геометрические характеристики, то можно установить следующее:
ü P электромагнитного поля - около 1 МПа
ü P газовой среды - около 1 МПа
ü P жидкостной среды - 6,3-40 МПа и выше.
Следовательно, гидравлический привод во многие разы и даже десятки раз более энергоёмкий, чем электрический и пневматический.
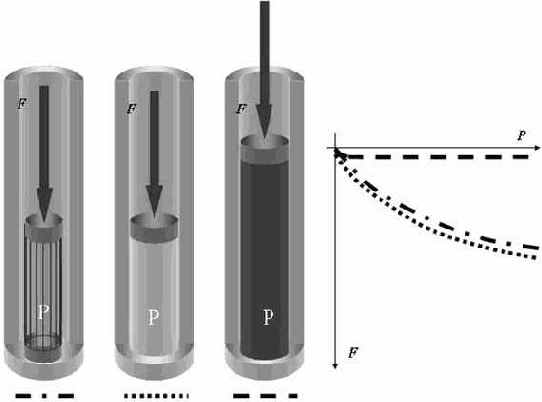
При этом гидравлический привод имеет еще одну, очень важную особенность, которую можно проиллюстрировать на следующем опыте. Возьмём три одинаковых цилиндра. В первый цилиндр поместим два магнита одноимёнными полюсами навстречу друг к другу так, чтобы верхний магнит мог играть роль подвижного поршня. Во втором, заполненном воздухом, и третьем, заполненном жидкостью, установим плотно пригнанные поршни. Ко всем трём поршням приложим силы, сжимающие рабочие среды: электромагнитное поле, воздух и жидкость. При увеличении сил поршни начнут опускаться, а напряжение рабочих сред P будет расти. В цилиндре с жидкостью перемещение будет практически незаметным по сравнению с остальными цилиндрами. Т.е. жидкость по сравнению с газом и электромагнитным полем, практически несжимаема в большом диапазоне сил. Последнее проиллюстрировано на графике. Это качество обеспечивает высокую жёсткость гидропривода в большом диапазоне нагрузок.
Описанные особенности гидравлического привода определяют область его использования в технике. В большинстве случаев его применение обусловлено необходимостью в высоких энергетических показателях при малом весе или габаритах.